Initial Launch Positions
This short notebook demonstrates how to inspect a trebuchet’s starting configuration and visualize it.
Create a default
HingedCounterweightTrebuchetPrint the initial angles in degrees for the arm, counterweight, and projectile
Render a clean plot of the initial position
Tip: You can tweak geometric parameters on HingedCounterweightTrebuchet.default() and re-run to see how the initial pose changes.
[1]:
from math import pi
from pytrebuchet.plotting.initial_position import plot_initial_position
from pytrebuchet.trebuchet import HingedCounterweightTrebuchet
1. Setup
We import the core classes and a helper plotting function. The default factory HingedCounterweightTrebuchet.default() supplies a reasonable geometry and masses.
2. Inspect initial angles
We print the initial angles in degrees for:
Arm (main beam)
Counterweight
Projectile (at sling end)
[2]:
trebuchet = (
HingedCounterweightTrebuchet.default()
) # Create a default hinged counterweight trebuchet
print(f"Initial angle arm: {trebuchet.init_angle_arm * 180 / pi:.2f} deg")
print(f"Initial angle weight: {trebuchet.init_angle_weight * 180 / pi:.2f} deg")
print(f"Initial angle projectile: {trebuchet.init_angle_projectile * 180 / pi:.2f} deg")
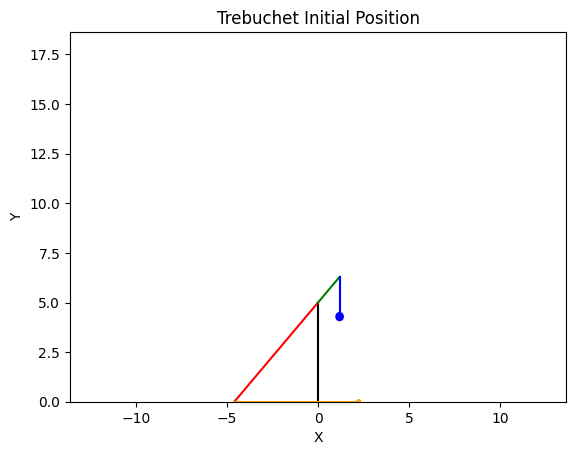
Initial angle arm: 47.41 deg
Initial angle weight: -90.00 deg
Initial angle projectile: 0.00 deg
3. Plot initial position
We now draw the starting configuration. This helps verify the pivot height, arm lengths, sling geometry, and projectile placement before running any dynamic simulation.
[3]:
plot_initial_position(trebuchet=trebuchet)
[3]:
(<Figure size 640x480 with 1 Axes>,
<Axes: title={'center': 'Trebuchet Initial Position'}, xlabel='X', ylabel='Y'>)
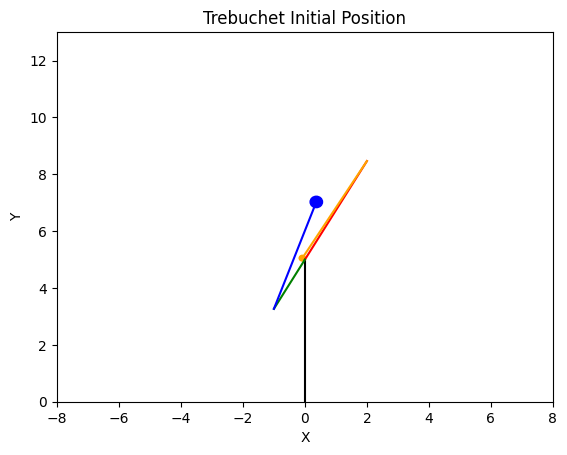
4. Whipper configuration
We now do the same for a WhipperTrebuchet.
[4]:
from pytrebuchet.trebuchet import WhipperTrebuchet
whipper = WhipperTrebuchet.default() # Create a default whipper trebuchet
print(f"Initial angle arm: {whipper.init_angle_arm * 180 / pi:.2f} deg")
print(f"Initial angle weight: {whipper.init_angle_weight * 180 / pi:.2f} deg")
print(f"Initial angle projectile: {whipper.init_angle_projectile * 180 / pi:.2f} deg")
plot_initial_position(trebuchet=whipper)
Initial angle arm: 240.00 deg
Initial angle weight: 70.00 deg
Initial angle projectile: 238.60 deg
[4]:
(<Figure size 640x480 with 1 Axes>,
<Axes: title={'center': 'Trebuchet Initial Position'}, xlabel='X', ylabel='Y'>)